


Viele Inspektionsaufgaben sind gerade im Verpackungsbereich mit 3D-Kameras einfacher zu realisieren als mit 2D-Systemen: So lassen sich beispielsweise indirekt zusätzliche Höheninformationen zu kleinen Vertiefungen und Oberflächenstrukturen extrahieren und sichtbar machen. Dafür hat Matrix Vision die Vorteile der Stereoverfahren in einem Gerät vereint.
Fragt man Verpackungshersteller, warum sie keine 3D-Kamera einsetzen, so antworten sie in der Regel: „3D ist zu teuer“, „Für jeden Anwendungsfall muss man eine Sonderversion der Kamera verwenden“ oder „Es gibt wenige Systemintegratoren, die sich mit 3D auskennen“.
Anliegen von Matrix Vision bei der Entwicklung der Perception Camera Mv Percam war es daher, eine kostengünstige 3D-Kamera zu entwickeln, die sich für viele Einsatzbereiche eignet und sich zudem leicht implementieren lässt.
Doch welche der gängigen 3D-Verfahren ist dafür am besten geeignet? Hier ein Überblick:
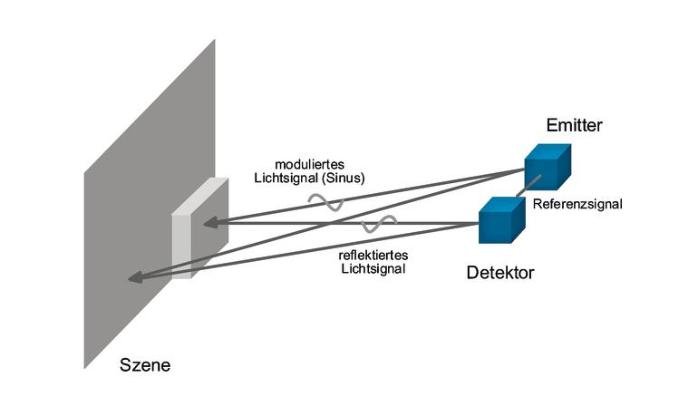
- Time of Flight (TOF) Systeme: Sie senden Licht aus und messen die Phasenverschiebung des reflektierten Lichts. Die Phasenverschiebung ist ein Maß für den Abstand des Objekts. Die Messung erfolgt sehr schnell. Damit können bewegte, wie auch stehende Objekte gleichermaßen gut detektiert werden. Das ausgesendete Licht muss sich auch gegen das Umgebungslicht behaupten, was eine Anwendung im Außenbereich kaum möglich macht. Ein weiterer Nachteil: Reflektiert das gesendete Licht mehrfach an den Objekten so entstehen Pseudoobjekte, die weiter entfernt zu liegen scheinen.
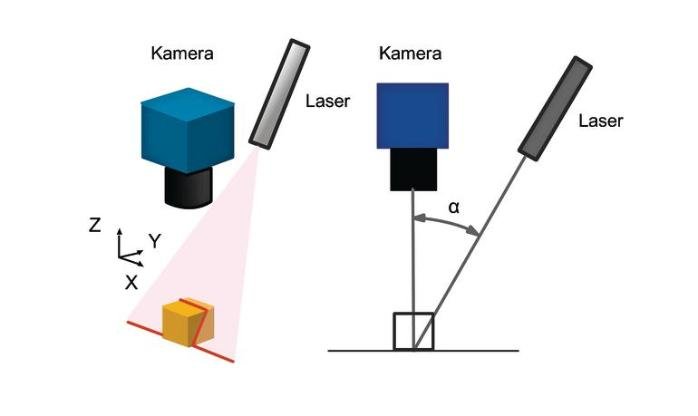
- Laser-Triangulation: Eine Laser-Linie wird in einem schrägen Winkel auf ein Objekt projiziert und mit einem anderen Winkel wird die Szene von einer Kamera aufgenommen. Eine Höhenänderung führt zu einer Verschiebung der Linie im Bild. Damit lässt sich an einer einzelnen Linie ein Höhenprofil aufnehmen. Um ein gesamtes Objekt zu erfassen, wird das Objekt unter dem Aufnahmesystem bewegt. Ein Scan dauert so viele Bildaufnahmen, wie es braucht, das Objekt darunter hinweg zu bewegen. Sinnvollerweise muss die Aufnahmegeschwindigkeit mit der Bewegungsgeschwindigkeit des Objekts synchronisiert werden. Messauflösung und Scan-Zeit sind recht hoch.
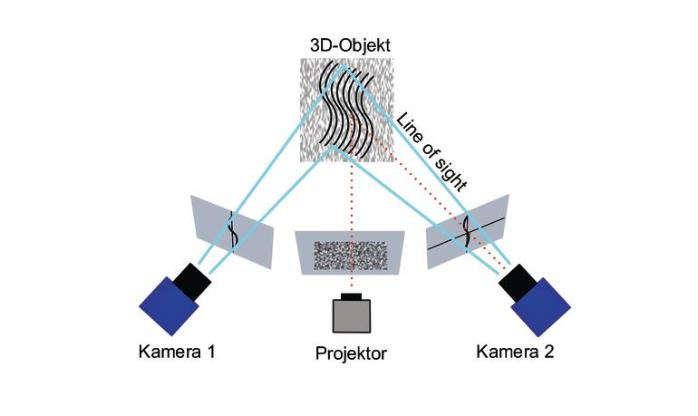
- Streifen-Projektion: Sie ähnelt der Laser-Triangulation. Hier werden gleich mehrere Streifen mittels eines Projektors auf die Szene projiziert. Anstatt das Objekt zu bewegen, verschiebt man die Streifen mit dem Projektor solange, bis sich das Streifenmuster wiederholt. Damit braucht das Verfahren nur 10 bis 30 Bildaufnahmen anstatt hunderte. Aber das Objekt muss still stehen. Um schnelle Messzyklen zu erreichen, erhöht man die Bildrate der Kameras und die Umschaltgeschwindigkeit der Projektoren. Doch ist das System empfindlich bezüglich Temperaturschwankungen und mechanischen Beanspruchungen.
- Strukturiertes Licht: Hier wird eine statische Lichtquelle verwendet, die eine unregelmäßige Struktur auf das Objekt projiziert. Die Kinect 1.0 von Microsoft arbeitet mit diesem Verfahren und hat bewiesen, dass es kostengünstig und in Stückzahlen herzustellen ist. Die Lichtquelle ist mit einem Abstand zur Kamera angebracht und bildet somit ein Stereopaar, das nur aus einer Kamera besteht. Das Messprinzip ist mit dem Stereoverfahren vergleichbar. Eine erweiterte Ausführung dieses Verfahrens verwendet zwei Kameras. Damit hat man wiederum den Vorteil, die Beleuchtungsquelle im Winkel und Abstand nicht konstant halten zu müssen.
Alle beschriebenen Systeme sind typischerweise für einen vordefinierten Messbereich gebaut. Durch Variation von Kameraabstand und/oder -winkel wird der Messbereich mechanisch definiert. Eine Veränderung der Winkel und der Abstände im Betrieb, wie es durch Temperaturschwankungen oder durch Vibrationen vorkommen kann, verändert das Messergebnis. Im industriellen Umfeld stehen selten klimatisierte Räume zur Verfügung. Auch Roboter dekalibrieren regelmäßig die aufmontierten Kamerasysteme.
Jedes Verfahren bietet sich somit mal mehr, mal weniger für eine gewisse Inspektionsaufgabe an. Ziel der Entwickler aber war es, möglichst viele Anwendungen mit einer Kamera lösen zu können. Die Lösung bestand in der Zusammenfassung aller Vorteile der bisherigen Verfahren, ohne deren Einschränkungen zu übernehmen
Die Mv Percam paart deshalb das Stereoverfahren mit strukturiertem Licht. Um ein größeres Messfeld zu erreichen und um nicht unterschiedliche Kameraabstände sowie -winkel in der Produktion sonderfertigen zu müssen, wurde eine zusätzliche Kamera spendiert.
Drei Kameras für mannigfaltige Kombinationen
Mit drei Kameras ist somit eine Multistereo-Kamera entstanden. Jede Kombination zweier Kameras hat einen unterschiedlichen Abstand zueinander und damit unterschiedliche Arbeitsbereiche. Objekte in nahem Abstand zur Kamera werden von den Kameras mit dem kürzesten Abstand am besten erfasst und die fernen Objekte von den Kameras mit dem weitesten Abstand. Zwar sehen alle Kameras das Objekt, jedoch ist der Versatz der Objekte im Bild bei weitem Kameraabstand größer. Somit ergibt sich einen höhere Messgenauigkeit, wenn man die beiden äußeren Kameras für ferne Objekte verwendet.
Die 3D-Kamera erreicht damit ab Werk einen Messbereich von circa 25 bis 250 cm mit nur einem Kamerasystem. Die Genauigkeit ergibt sich durch die dreifache Stereokamera auf 3 mal 256 Disparitäten, also 768. Dies entspricht einer Messauflösung von circa ±35 µm bei 25 cm und circa ±3 mm bei 250 cm.
Das Stereoverfahren lebt davon, dass in beiden Bildern die gleiche Struktur gefunden wird. Strukturen sind Kanten und unregelmäßige Texturen. Um die Messung von unstrukturierten Flächen wie zum Beispiel bei unbedruckten Schachteln zu ermöglichen, beleuchtet die Kamera das Objekt mit strukturiertem Licht. Somit wird dem Objekt eine zusätzliche Struktur hinzugefügt. Im Outdoor-Bereich macht die Beleuchtung wenig Sinn, da dort die Umgebungsbedingungen oft heller sind, als die integrierte Beleuchtung. Üblicherweise erhält man dennoch genügend natürliche Strukturen durch die Reflexionen und gespiegelten Strukturen der Umgebung.
Angeschlossen wird die Kamera an einen PC mit einem Ethernet-Kabel. Dadurch wird maximale Flexibilität gewährleistet, und PCs können auch in 100 m Abstand aufgestellt werden. Die Bilder der Kamera werden per Genicam zum PC übertragen und dort ausgewertet. Die Berechnung erfolgt, sofern verfügbar, automatisch auf einer eingebauten Grafikkarte. Dies entlastet den Hauptprozessor, der somit weitere Bildauswertungen vornehmen kann.
Die 3D-Daten (x,y,z) werden mit 30 Bildern pro Sekunde und somit in Videoechtzeit berechnet. Berechnet werden nicht nur die Tiefeninformationen, sondern auf Wunsch auch die Bewegungsinformationen. Die Bewegungsinformationen liefern zusätzlich die Bewegungsvektoren zu jedem Strukturpunkt, der in zwei zeitlich aufeinander folgenden Bildern zu sehen ist. Auch die Bewegungsinformationen liegen im 3D-Raum als Vektoren (vx, vy, vz) vor, somit kann man von 6D-Daten sprechen. Damit kann auch bestimmt werden, ob sich ein Objekt von der Kamera weg oder zu ihr hin bewegt.
Damit nicht genug – diese Daten sind zusätzlich farbig und werden im RGB-Farbraum abgebildet. Da stellt sich die Frage: Wozu brauche ich Bewegung und Farbe?
Die Antwort wird mit einer Gegenfrage beantwortet: Warum nicht? Lieber zu viele Informationen generieren, als zu wenig. Dadurch ist die 6D-Kamera auch für zukünftige Aufgaben gerüstet, falls zum Beispiel später rote von grünen Verpackungen unterschieden werden müssen. Dies ist weder durch reine 3D-Information noch mittels Graubilder möglich. Zugegeben, durch rote Beleuchtung sind rote Verpackungen heller und grüne dunkler. Jedoch können mit dieser Speziallösung nur grüne von roten Verpackungen unterschieden werden. Die Perception Cam hingegen liefert den Farbwert – und der Anwender kann per Software entscheiden, was er haben möchte.
Die Mv Percam liefert bei 1024 x 1024 Bildpunkten (X/Y-Auflösung) etwa 9 Millionen Werte (x,y,z,vx,vy,vz, r,g,b) pro Bild bei 30 Bildern/s. Die Verarbeitung dieser Daten ist komplex, und höher, als wenn versucht wird, auf einem 2D-Graubild Objekte zu erkennen.
Um den Anwender nicht zu überlasten, wurde eine Wahrnehmungsfunktion in die Kamera integriert. Mit weichen, formbeschreibenden Begriffen beschreibt der Anwendungsentwickler, welche Objekte ihn interessieren. Zum Beispiel: „Ich suche einen Bildbereich mit einer möglichst hohen Messdichte, während die Höhenänderungen eher linear sind.“ Letztlich beschreibt er damit eine Ebene. Diese ist durch vier Kanten eingerahmt. Geliefert werden die Eckkoordinaten dieser Kanten. Werden also Schachteln gesucht, die aus solch ebenen Flächen bestehen, ergibt das anstatt 9 Millionen Werte nur noch vier Ecken mit jeweils drei Werten (x,y,z). Farbe und Geschwindigkeit waren im obigen Ausdruck nicht definiert, demzufolge unwichtig.
Im Vergleich zur Mv Percam bieten das Streifenlichtprojektions- und das Lasertriangulationsverfahren allgemein eine noch höhere Auflösung. Diese wird im Packaging-Umfeld benötigt, um eng aneinander liegende Objekte trennen zu können: Zwei Schachteln von gleicher Höhe, plan auf einer Unterlage und direkt aneinander liegend, lassen sich ohne Apriori-Wissen wie Größe oder Aufdruck, nur eindeutig trennen, indem der schmale Spalt zwischen den Schachteln gemessen wird, oder zumindest dort eine geringere Häufigkeit der Messpunkte bekommt. Ein 3D-System auf Basis des Stereoverfahrens benötigt hierzu eine hohe X/Y-Auflösung, was wiederum das Sichtfeld einschränkt oder die Bildrate reduziert.
Um eng aneinander liegende Objekte trennen zu können, wird mit der Mv Percam eine zusätzliche strukturierte Beleuchtung auf die Szene projiziert. Die zweite Beleuchtung wird wie bei der Triangulation in einem schrägen Winkel zur Kamera angebracht. Damit bilden sich feine Lücken in der veränderten Struktur der zweiten Beleuchtung ab und können als zusätzliche Unterbrechungen der 3D-Messpunkte betrachtet werden. ■
Teilen:







{kind=link}