



Ein Automobilhersteller stellt hohe Anforderungen an ein Bildverarbeitungssystem. In der folgenden Anwendung soll ein vollautomatisches Handlingsystem schwere Getriebeteile aus Gitterboxen entnehmen, um sie einer weiterverarbeitenden Fertigungslinie zuzuführen.
Dipl.-Ing. Patrik Schweikert, Gruppenleitung Fabrikautomation, VITRONIC Dr.-Ing. Stein Bildverarbeitungssysteme GmbH, Wiesbaden
Die Randbedingungen sind sehr anspruchsvoll: die Teile haben eine schwarze Oberfläche, daraus resultiert ein geringes Kontrastverhalten zum Hintergrund; neben einer schmutzigen, industriellen Umgebung können die Teile leicht gekippt in der Gitterbox stehen; schließlich können schwankende Gussqualitäten auftreten, da die Teile von unterschiedlichen Zulieferern stammen. Dessen ungeachtet wird mittels Bildverarbeitung eine Erkennungsrate > 99% erzielt.
Wenn „Bildverarbeitung“ im Zusammenhang mit „Roboter-Handling“ genannt wird, so denkt man dabei meist an relativ einfache Pick-and-Place-Aufgabenstellungen, die an die Bildverarbeitung keine großen Anforderungen stellen.
Typischerweise soll bei solchen Anwendungen ein Roboter gut kontrastierende Teile beispielsweise von einem Förderband aufnehmen. Die eigentliche Bildverarbeitung kann sich dabei auf Algorithmen beschränken, die z.B. eine kompakte Objektfläche durch Binarisierung erkennen, oder aber die Außenkontur des Objekts mit einem Tracking-Verfahren finden.
Die hier beschriebene Anwendung stellt eine technisch anspruchsvolle Lösung vor, die der Wiesbadener Bildverarbeitungsspezialist Vitronic Dr.-Ing. Stein Bildverarbeitungssysteme GmbH bei einem Automobilhersteller realisiert hat. Aufgrund der Objektbeschaffenheit bzw. der Umgebungsbedingungen kommen besondere Algorithmen zum Einsatz.
Entnahme der Teile
Hinterachsgetriebeteile werden in Gitterboxen angeliefert und müssen diesen entnommen werden, um sie einer weiterverarbeitenden Fertigungslinie zuzuführen. Um einen rückenschädigenden Arbeitsplatz beim händischen Entnehmen der bis zu vier-zehn Kilogramm schweren Gussteile zu vermeiden, soll dies vollautomatisch erfolgen.
Die schematische Darstellung verdeutlicht die zu lösende Automatisierungsaufgabe: Die schwarzen Hinterachsgetriebeteile sind in drei Ebenen, durch Zwischenlagen getrennt und in einer (hier grün dargestellten) Gitterbox aufgestapelt. Durch die fast einen Meter hohe, dreilagige Aufstapelung sind die schweren Gussteile nicht nur in ihrer Position in der Ebene undefiniert, sondern zusätzlich kann ihre Längsachse gekippt sein.
Damit nun ein Roboter die Hinterachsgetriebeteile in allen sechs Raumfreiheitsgraden exakt in eine Übergabeposition ablegen kann, muss das Bildverarbeitungssystem alle Lagevarianzen der Teile bestimmen und der Robotersteuerung in deren Weltkoordinatensystem übermitteln.
Weiterhin muss das System in der Lage sein, teilbefüllte Gitterboxen als solche zu erkennen, sowie die (hier rot dargestellten) Zwischenlagen zu entnehmen. Um Kollisionen des Greifers mit eventuell fälschlich zugeführten Teilen eines anderen Typs zu vermeiden, soll das System eine solche Situation vorab erkennen und eine Störung melden.
Die Automatisierungslösung soll vollautomatisch und ohne notwendiges Eingreifen von Bedienpersonal laufen. Dies betrifft den gesamten Prozess beginnend mit der Zuführung einer vollen Gitterbox, der Entnahme aller Getriebeteile und deren exakten Ablage in der weiterverarbeitenden Anlage auf circa einen Millimeter Genauigkeit, das Entnehmen der Zwischenlagen, bis hin zum Ausfahren der entladenen Gitterbox.
Für die Entnahme der Teile aus der circa 1m x 1,20m breiten und circa 1m hohen Gitterbox ist ein Sechs-Achs-Industrieroboter im Einsatz.
Entnahme der Teile aus der Gitterbox
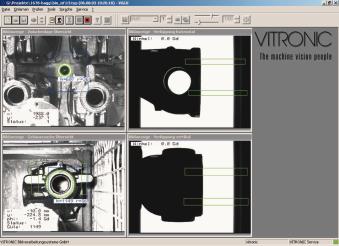
Am Roboterarm sind seitlich eine Bildverarbeitungskamera sowie eine kleine Halogenleuchte montiert. Die Kamera ist an „VIRO“, das Robot-Vision-System von Vitronic, angeschlossen. Der PC-basierte Bildverarbeitungsrechner kommuniziert mit dem Roboter-Steuerrechner über ein DeviceNet-CAN-Bussystem.
Zu Beginn eines Zyklus fährt der Roboter die Kamera über eine mögliche Teileposition und übermittelt der Bildverarbeitung einen Messauftrag. Das Machine Vision System analysiert das Kamerabild hinsichtlich des Vorhandenseins eines Teils. Im Falle einer erfolgreichen Prüfung werden die Greifkoordinaten sowie die Drehlage ermittelt, in das Roboter-Weltkoordinatensystem transformiert und an die Robotersteuerung weitergegeben.
Dabei erfordert die schwarze Teileoberfläche mit unterschiedlichen Störkonturen in der Umgebung eine spezielle Kamera- / Beleuchtungsanordnung und Bildverarbeitungssoftware. Durch die neben der Kamera montierte Beleuchtung erreicht man eine Aufhellung der zu greifenden Hinterachsgetriebeteile. Die glänzende Teileoberfläche erlaubt es jedoch nicht, eine kompakte, helle Fläche zu erzeugen, die dann als geschlossenes Objekt vom Bildverarbeitungssystem gefunden werden könnte. Die markanteste Geometrie des zu greifenden Getriebeteils ist seine nach oben zeigende, kreisförmige Achsöffnung, deren Mittelpunktkoordinaten der Roboter zum Greifen benötigt.
Daher wurde von Vitronic ein spezielles Verfahren entwickelt, das Konturpunkte der kreisförmigen Achsöffnung mit einem zuvor eingelernten Modell des Kreises korreliert und damit den Kreismittelpunkt findet. Der Vorteil dieses Verfahrens liegt in der Robustheit gegenüber verschiedener äußerer Störeinflüsse: Sind beispielsweise einige Bereiche der Öffnung wegen Verschmutzung nicht kontrastierend, so wird trotzdem der gesuchte Kreismittelpunkt aus den verbleibenden Konturpunkten berechnet.
Ist der so ermittelte Kreismittelpunkt erst einmal bekannt, kann das Bildverarbeitungssystem relativ dazu an Hand von Teilekonturen in tangentialer Richtung die Drehlage des Teils in der Ebene ermitteln. Der Roboter taucht nun seinen pneumatischen Spannbackengreifer in das Hinterachsgetriebeteil ein und entnimmt es der Gitterbox. Der Greifer ist derart konstruiert, dass er hierbei leichtes Verkipptstehen der Teile toleriert.
Diese Applikation beweist, dass auch bei Herausforderungen wie geringem Kontrast-verhalten durch dunkle oder glänzende Oberflächen, schmutziger Umgebung und verkippter Teile, Lösungen mit speziell entwickelten Bildverarbeitungssystemen möglich sind.
Korrektur der Teileverkippung um die Längsachse
Die Aufgabenstellung fordert eine exakte Ausrichtung des Teils in allen sechs Freiheitsgraden. In Schritt 1 wurde die Position des Hinterachsgetriebeteils in der Ebene sowie die Drehung um die Längsachse ermittelt. Um auch noch die Verkippung der Längsachse zu ermitteln, präsentiert der Roboter das Gussteil einer weiteren Bildverarbeitungsstation. Diese besteht aus einer stationären Kamera mit großflächiger Durchlichteinheit. In dieser Station ermittelt das Robot-Vision-System VIRO nun die Ausrichtung der Teilelängsachse relativ zur Roboterhand; es wird also geprüft wie „schief“ das Teil von der Hand gegriffen wurde.
Da es sich bei dieser Messung um eine zweidimensionale Projektion handelt, können nicht alle Kippwinkel der Längsachse erfasst werden. Erst eine Rotation um die Längsachse um 90° ermöglicht eine Messung der dazu orthogonalen Verkippung.
Ablage des Hinterachsgetriebeteils zur Weiterbearbeitung
Dem Roboter liegen nun zu allen sechs Freiheitsgraden Korrekturwerte in seinem Roboterkoordinatensystem vor und er kann jetzt die Teile mit einer Toleranz kleiner ein Millimeter auf einer Übergabeposition zur nachgeschalteten Bearbeitungsmaschine ablegen. Dabei hat das Bildverarbeitungssystem alle notwendigen Koordinatentransformationen vorgenommen, so dass die Robotersteuerung ausschließlich im Weltkoordinatensystem rechnen kann.
Zwischenschritt: Entnahme der Zwischenlage: Wie oben beschrieben, sind die zu entpalettierenden Hinterachsgetriebeteile in drei Ebenen in der Gitterbox übereinander geschichtet. Zwischen diesen Ebenen befinden sich Kunststoffpaletten, die ebenfalls vollautomatisch vom gleichen Handlingssystem entnommen werden müssen. Wenn das Bildverarbeitungssystem dem Roboter meldet: „kein Teil vorhanden“, fährt dieser die am Roboterarm befestigte Kamera über ein Greifloch in der Palette. Das Bildverarbeitungssystem ermittelt nun analog zur Teilevermessung die exakten Mittelpunktkoordinaten dieses Greiflochs. Mit dieser Information kann der Roboter nun die Zwischenpaletten entnehmen und an einer separaten Ablageposition aufstapeln.
Die unter der Zwischenlage liegende Teileebene ist nun frei zugänglich und die Teile können wie oben beschrieben mit den Schritten 1 bis 4 entpalettiert werden.
Fazit
Die beschriebene Anlage läuft in doppelter Ausführung vollautomatisch mit einer Verfügbarkeit von über 99% im Schichtbetrieb.
Die PC-Bildverarbeitungssysteme sind im Betriebsnetzwerk integriert. Dies erlaubt eine Beobachtung der Anlage vom Büroarbeitsplatz des zuständigen Fachpersonals aus. So können beispielsweise Teilestatistiken über Web-Browser abgerufen werden.
Die zum Einsatz gekommenen störsicheren Bildverarbeitungsverfahren arbeiten wartungsfrei. Bei Bedarf, z.B. nach Wartungsarbeiten am Roboter, kann eine Neukalibrierung des Bildverarbeitungssystems selbständig durch das Bedienpersonal durchgeführt werden.
Eventuell gewünschter Support kann sehr kurzfristig erfolgen, da die Systeme mit einer Fernwartung ausgestattet sind.
QE 527
Teilen:






{kind=link}