





Krebsfrüherkennung im Verdauungstrakt ist ein wichtiger Schritt, um gezielt die im frühen Stadium meist noch harmlosen Veränderungen der Magen-Darm-Wand zu entfernen. Stand der Untersuchungs-Technik heute sind Endoskope, die oral oder anal in den Körper eingeführt werden. Diese Art der Früherkennung ist suboptimal, was die Belastung des Patienten angeht. Aus Angst vor der Untersuchung nimmt ein Großteil der Bevölkerung dieses kostenlose Angebot nicht wahr und riskiert, dass Krebsvorstufen unentdeckt bleiben und sich zu bösartigen Tumoren entwickeln.
Das EU-Forschungsprojekt Vector setzt daher auf moderne Technik. Eine steuerbare Kapsel mit Kamera und Funkübertragung der Bilder in Echtzeit soll das Endoskop ersetzen. Um die magnetische Kapsel sicher vom Arzt an bestimmte Orte zu führen, setzen die Entwickler einen Industrieroboter mit starkem Permanentmagneten ein. So können auch größere Hohlorgane komplett gescannt werden.
Eine relativ kleine Kamerakapsel, die geschluckt wird, gibt es bereits. Das Problem dieser Lösung ist die passive Bewegung der Kapsel und die fest eingestellte Zeit zwischen den Aufnahmen. Je nach Transportbewegung und Aufnahmezyklus können nicht alle Bereiche aufgenommen werden, die von Interesse sind. Im Rahmen des EU-Projektes Vector arbeiten Forscher aus über 18 Ländern an einer Lösung dieses Problems. Unter der Federführung von novineon als Koordinator der einzelnen Forschungsaufgaben entstand so ein völlig neues Konzept: die von außen steuerbare Kamerakapsel mit Bildübertragung in Echtzeit. Um die gezielte Fortbewegung präzise umzusetzen, griffen die Forscher auf bestehende Automatisierungstechnik zurück. Industrieroboter von Mitsubishi Electric erwiesen sich dabei als die richtige Lösung für die gezielte Kapselnavigation.
Gezielt nachsehen ohne blinde Stellen
Konnten bisherige Kamerakapseln nur Aufnahmen aus dem Bereich des Dünndarms machen, so sollte das neue Verfahren auch die größeren Hohlräume in Magen und Dickdarm komplett erfassen können. In späteren Ausbaustufen ist angedacht, dass die Kapseln neben dem Screening (Suche nach verdächtigen Stellen) auch Diagnose (Bewerten von verdächtigen Stellen z.B. über Gewebeproben) und Therapie (Behandlung der gefundenen Stellen) übernehmen können. Dazu ist es erforderlich, die Position der Kapsel und damit den Kamerablick- und Werkzeugwinkel (z.B. für Gewebeentnahme) gezielt zu verändern. Als Antrieb war zuerst ein sogenanntes Käfer-Modell mit autarkem Beinantrieb im Gespräch. Diese Version scheiterte jedoch am Energiehaushalt. Der kleine Käfer konnte schlicht nicht genug Strom mitführen um lange genug eine Kamera, Funkübertragung und Antrieb betreiben zu können. Die Idee eines Antriebs durch eine magnetische Hülle in Verbindung mit einem starken externen Permanentmagneten kam auf.
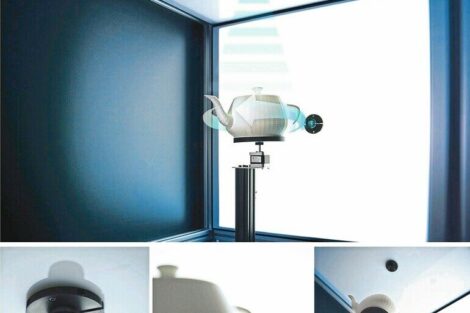
Um diese Antriebsart in die Praxis umzusetzen, waren zahlreiche Schwierigkeiten zu überwinden. Sogar moderne Hochleistungsmagnete bringen in der geforderten Leistungsklasse einige Kilogramm Masse auf die Waage. Kleinere Magnete können nicht eingesetzt werden, da die Kapsel eine Mindestgröße nicht unterschreiten kann. Selbst bei Verzicht auf die Eigenfortbewegung und Einsatz eines eigens entwickelten, energiesparenden Bildfunksystems misst die Kapsel heute noch rund einen Zentimeter im Durchmesser bei ca. drei Zentimetern Länge (Bild 1).
Auch hier ist der Energiespeicher für Aufnahme und Übertragung der rund 15 bis 25 Bilder pro Sekunde der Hemmschuh. Weniger Bildfrequenz bedeutet bei Echtzeitsteuerung durch den Mediziner quasi Blindflug, ein nicht zu akzeptierender Sicherheitsmangel. Echtzeitsteuerung benötigt Rechenleistung und Direktsicht. Jeder Spieler am Computer weiß, ohne Rechenleistung ruckelt das Bild. Da die Kapsel später wie mit einer Spielkonsole gesteuert werden soll, sind schnelle Bildfolge und direkte Reaktion der Kapsel auf Befehle unabdingbar. Auf der Suche nach der besten Steuerungslösung wurden die Forscher bei Mitsubishi fündig. Der Roboterspezialist hat kleine Knickarm-Industrieroboter im Programm, die sowohl bei der Dynamik, der Tragkraft als auch der Präzision alle Vorgaben erfüllen und zudem in der Steuerung genügend Kapazitäten für Zusatzoptionen haben.
Forschung benötigt Freiheit
Da das Projekt noch ganz am Anfang stand, mussten so viele Daten wie möglich gesammelt werden. Die kleinen Roboterarme kamen diesen Anforderungen ideal entgegen. Dr. Sebastian Schostek, Geschäftsbereichsleiter bei von novineon dazu: „Der Roboterarm mit der Steuerung ist echtzeitfähig, die Programmierung der Servotechnik für den ersten Roboterbetrieb war auch für Fachfremde innerhalb von ein bis zwei Tagen zu beherrschen. Da Servoplattform wie Roboterarm sehr viele Freiheitsgrade bieten, unterstützt das unsere Suche nach den tatsächlich medizinisch relevanten Bewegungsabläufen. Wir können so alles auf einem einzigen bewährten System austesten. Zudem ist das Preis-Leistungsverhältnis unschlagbar, ein wichtiger Punkt gerade bei Start-up-Unternehmen oder begrenztem Forschungsbudget“.
Um sich alle Möglichkeiten offen zu halten, wurde zuerst ein Knickarm-Roboter mit sechs Achsen und 12 kg Tragkraft installiert. So konnten bei der Magnetentwicklung und der Magnetaufnahme alle Ideen ausgetestet werden. Die vorab geschätzten 10 kg für den Magnetkopf sollten in jedem Fall sicher bewegt werden können (Bild 3). Ein zweiter Roboter, der später in Italien aufgestellt wurde, profitierte vom zwischenzeitlichen Erkenntnisgewinn. Da der Führungsmagnet auf rund 4 kg abgespeckt werden konnte, genügte ein kleineres Modell mit weniger Tragkraft.
Der im Tübinger Forschungslabor eingesetzte Roboterarm (Bild 4) wiegt mit ca. 100 kg vergleichsweise wenig, ein selbst entwickelter Unterbau mit der Energieversorgung gibt genügend Standfestigkeit auch im Praxistest (Bild 5 a,b). Alle Komponenten lassen sich für Messen oder externe Demonstrationen schnell zerlegen und einfach auf Paletten transportieren.
Roboter als Kreativ-Aktor
Der Unterschied zwischen Forschungs- und Industrieeinsatz von Roboterarmen ist nur scheinbar groß. Beide Einsatzbereiche verlangen nach kreativen Lösungen, um das Optimum für den jeweiligen Einsatzzweck zu erreichen.
Moderne Industrieroboter sind keinesfalls auf bestimmte Anwendungen festgelegt, im Gegenteil. Sie bieten eine große Bandbreite an Bewegungsabläufen, die sie für viele auch exotische Einsätze prädestinieren. Gerade bei Anwendungen wie der Forschung oder unkonventionellen Lösungen in der Fertigung, wo bei Beginn der Entwicklung das Endergebnis noch nicht abzusehen ist, sind sie als Kreativ-Aktor unverzichtbar. Als bewährtes Massenprodukt kommen gegenüber Eigenentwicklungen noch ein günstiger Preis und schnelle Ersatzteilversorgung hinzu.
MItsubishi Electric Europe, Ratingen www.mitsubishi-automation.de
Gewusst wie
Um eine Kamera in einer Kapsel wirklich lageunabhängig zu steuern, ist ein komplexes Bewegungsprofil erforderlich. Die magnetische Positionierung macht sich daher grundlegende physikalische Eigenschaften zu Nutze: Gleichnamige Magnetpole stoßen sich ab, ungleichnamige ziehen sich an. Betrachtet man die Kapsel in Längsrichtung als Stabmagnet, so richtet sich diese immer im Magnetfeld des großen externen Permanentmagneten aus. Nimmt man nun als Führungsmagnet am Roboterarm einen Magnetzylinder, der quer zur Längsrichtung in N- und S-Pol radial magnetisiert ist, kann durch einfaches Drehen des Magnetzylinders die Kapsel gedreht werden. Wird der Zylinder dagegen vor oder zurückbewegt, zieht er die Kapsel als Ganzes mit. Überlagert man die unterschiedlichen Bewegungen, ergibt sich die Möglichkeit, alle Stellen exakt vor die Kameralinse zu bekommen, die der Arzt für sehenswert hält. Selbst Rückwärtsfahrt oder Umkreisung bestimmter Stellen ist so möglich. Da statische Magnetfelder physiologisch unbedenklich sind, ist diese Art der Kapselsteuerung sehr schonend. Die Kraftkopplung zwischen dem externen Magneten und der Kapsel ist eher mit einem Gummiband als mit einer mechanischen Verbindung zu vergleichen. Zudem besteht der Verdauungstrakt aus weichem, sich bewegendem Gewebe mit ungleichmäßigen Oberflächenprofilen. Hier zeigen flexible Roboterarme ihre Stärke. Für den späteren Alltagseinsatz lassen sich so alle relevanten Daten vorab ermitteln. Die endgültige Lösung der Magnetsteuerung kann so für den Einsatz durch technische Laien auf medizinisch wirklich nötige, anwendungsspezifische Technik mit entsprechenden Sicherheitseinrichtungen beschränkt werden. Extrem teure Supertechnik entfällt, die Diagnose-Medizin wird preiswerter. Die genial einfache Technik erlaubt so den breiten Einsatz in den Praxen, ein mögliches Schulungs-Tutorium oder schnelle externe Diagnose vom Spezialisten per Internet verbessern das Screening zusätzlich.
Teilen:






{kind=link}