
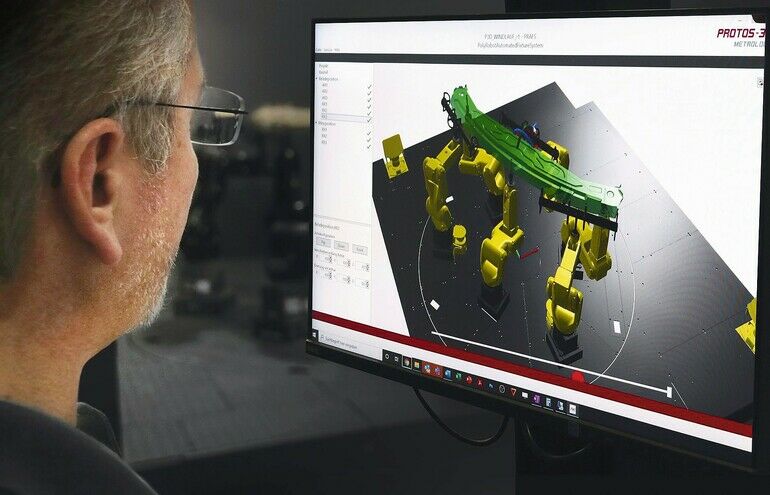
Mit Prafs wird die bisher manuell erfolgte Bauteil-Positionierung durch eine universelle robotergesteuerte Haltetechnik ersetzt. Das System speichert mehrere tausend unterschiedliche Aufbauten (Haltepositionen für Bauteile), die jederzeit über ein Human Machine Interface (HMI) aus der Bauteilliste aufgerufen werden. Ist ein Bauteil ausgewählt, fahren die Roboter in die bauteilspezifischen Beladepositionen. Das Teil wird eingelegt und der Messvorgang per Knopfdruck gestartet. Ein Wechsel zwischen unterschiedlichen Bauteiltypen ist in weniger als einer Minute zu realisieren. Der gesamte Messprozess erfolgt sehr schnell, die Reproduzierbarkeit ist extrem hoch und der Bedienereinfluss minimal.
Prafs ersetzt herkömmliche mechanische Spannvorrichtungen, deren Herstellung kosten- und zeitintensiv ist. Darüber hinaus fordern sie große Lagerkapazitäten und sind bei Bauteiländerungen nur bedingt weiterverwendbar. Die Multi-Messaufnahme kann hingegen an sämtliche Modifikationen angepasst werden.
Prafs ist selbsterklärend und leicht zu bedienen. Das HMI führt den Bediener durch die einzelnen Schritte und gibt zum Beispiel klare Instruktionen, wann das Bauteil eingelegt beziehungsweise entnommen werden muss. Das geschieht in einer ergonomisch kraftsparenden Arbeitshöhe. Da der Messablauf durch das System festgelegt ist, sind Einflüsse des Bauteilhandlings so gut wie ausgeschlossen. Spezielle Fachkenntnisse zur Bedienung von Prafs sind nicht erforderlich.
Protos-3D, Halle 9, Stand 9502
Mehr zum Thema Messe Control







{kind=link}